
A perna robótica recentemente desenvolvida é inspirada em criaturas vivas e salta sobre diferentes terrenos de forma muito mais manobrável e com maior eficiência energética do que os robôs anteriores
Pesquisadores desenvolveram a primeira perna robótica que é alimentada por músculos eletro-hidráulicos artificiais e se adapta automaticamente a terrenos irregulares. O sistema é mais eficiente em termos de energia do que motores elétricos e permite saltos altos e movimentos rápidos sem sensores complexos. Embora a tecnologia ainda não esteja totalmente desenvolvida, ela é promissora e oferece potencial para futuras aplicações em robótica suave.
Inventores e pesquisadores desenvolvem robôs há quase 70 anos. Até o momento, todas as máquinas que eles construíram – seja para fábricas ou outros lugares – tiveram uma coisa em comum: elas são movidas por motores, uma tecnologia que já tem 200 anos. Até mesmo robôs que andam têm braços e pernas que são movidos por motores, não por músculos como em humanos e animais. Isso em parte sugere por que eles não têm a mobilidade e a adaptabilidade de criaturas vivas.
Uma nova perna robótica movida a músculos não é apenas mais eficiente em termos de energia do que uma convencional, ela também pode realizar saltos altos e movimentos rápidos, bem como detectar e reagir a obstáculos – tudo sem a necessidade de sensores complexos. A nova perna foi desenvolvida por pesquisadores do Instituto Max Planck para Sistemas Inteligentes (MPI-IS) e ETH Zurich em uma parceria de pesquisa chamada Max Planck ETH Center for Learning Systems, conhecido como CLS.
Eletricamente carregado como um balão
Assim como em humanos e animais, um músculo extensor e um flexor garantem que a perna robótica possa se mover em ambas as direções. Esses atuadores eletro-hidráulicos, que os pesquisadores chamam de HASELs, são presos ao esqueleto por tendões.
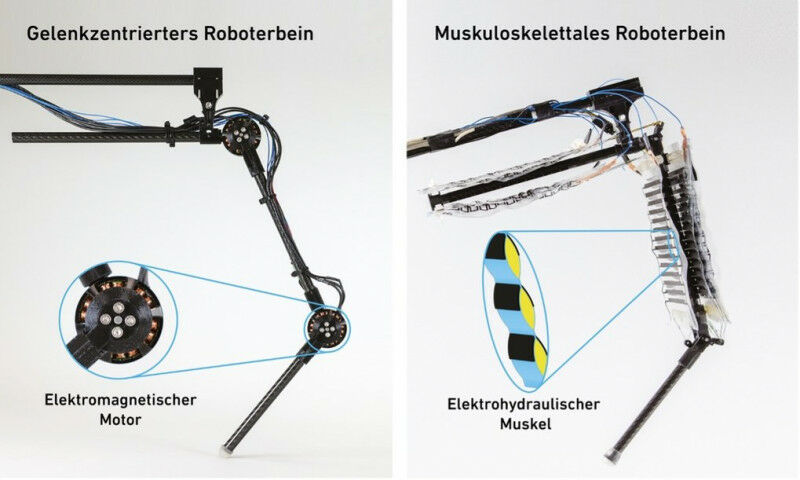
Os atuadores são sacos plásticos cheios de óleo, semelhantes aos usados para fazer cubos de gelo. Cerca de metade de cada saco é revestida em ambos os lados com um eletrodo preto feito de um material condutor. Buchner explica que – assim que aplicamos uma voltagem aos eletrodos, eles são atraídos um pelo outro devido à eletricidade estática. Da mesma forma, quando esfrego um balão na minha cabeça, meu cabelo gruda no balão devido à mesma eletricidade estática. – À medida que se aumenta a voltagem, os eletrodos se aproximam e empurram o óleo no saco para um lado, tornando o saco mais curto.
Pares desses atuadores presos a um esqueleto resultam nos mesmos movimentos musculares pareados como em criaturas vivas: conforme um músculo encurta, seu equivalente alonga. Os pesquisadores usam um código de computador que se comunica com amplificadores de alta voltagem para controlar quais atuadores se contraem e quais se estendem.
Mais eficiente que motores elétricos
Os pesquisadores compararam a eficiência energética de sua perna robótica com a de uma perna robótica convencional movida por um motor elétrico. Entre outras coisas, eles analisaram quanta energia é desnecessariamente convertida em calor. -Na imagem infravermelha, é fácil ver que a perna motorizada consome muito mais energia se, digamos, tiver que manter uma posição dobrada,- diz Buchner. A temperatura na perna eletro-hidráulica, em contraste, permanece a mesma. Isso ocorre porque o músculo artificial é eletrostático. -É como o exemplo com o balão e o cabelo, onde o cabelo fica preso ao balão por um longo tempo,- Buchner acrescenta. -Normalmente, robôs movidos a motor elétrico precisam de gerenciamento de calor, o que requer dissipadores de calor ou ventiladores adicionais para difundir o calor para o ar. Nosso sistema não os requer,- diz Fukushima.
Movimento ágil em terrenos irregulares
A capacidade da perna robótica de pular é baseada em sua capacidade de levantar seu próprio peso de forma explosiva. Os pesquisadores também mostraram que a perna robótica tem um alto grau de adaptabilidade, o que é particularmente importante para a robótica suave. Somente se o sistema musculoesquelético tiver elasticidade suficiente, ele pode se adaptar de forma flexível ao terreno em questão. – Não é diferente com criaturas vivas. Se não podemos dobrar nossos joelhos, por exemplo, andar em uma superfície irregular se torna muito mais difícil, – diz Robert Katzschmann da ETH Zürich, que está liderando a equipe junto com Christoph Keplinger do Instituto Max Planck de Sistemas Inteligentes. – Basta pensar em dar um passo para baixo da calçada para a estrada.-
Em contraste com motores elétricos que exigem sensores para dizer constantemente em que ângulo a perna robótica está, o músculo artificial se adapta à posição adequada por meio da interação com o ambiente. Isso é acionado apenas por dois sinais de entrada: um para dobrar a junta e outro para estendê-la. Fukushima explica: – Adaptar-se ao terreno é um aspecto fundamental. Quando uma pessoa pousa após saltar no ar, ela não precisa pensar com antecedência se deve dobrar os joelhos em um ângulo de 90 graus ou 70 graus. – O mesmo princípio se aplica ao sistema musculoesquelético da perna robótica: ao pousar, a junta da perna se move adaptativamente para um ângulo adequado, dependendo se a superfície é dura ou macia.
A tecnologia emergente abre novas possibilidades
Cientistas do Instituto Max Planck para Sistemas Inteligentes, juntamente com uma equipe da ETH Zurich, desenvolveram uma perna robótica alimentada por músculos artificiais eletro-hidráulicos conhecidos como HASELS. Inspirada em criaturas vivas, a perna salta por diferentes terrenos, como grama, seixos – até mesmo pedras – de forma ágil e com eficiência energética.

O campo de pesquisa de atuadores eletro-hidráulicos ainda é jovem, tendo surgido há apenas cerca de seis anos. – O campo da robótica está progredindo rapidamente com controles avançados e aprendizado de máquina; em contraste, houve muito menos progresso com hardware robótico, que é igualmente importante. Esta publicação é um poderoso lembrete de quanto potencial para inovação disruptiva vem da introdução de novos conceitos de hardware, como o uso de músculos artificiais -, diz Keplinger. Katzschmann acrescenta que é improvável que atuadores eletro-hidráulicos sejam usados em máquinas pesadas em canteiros de obras, mas eles oferecem vantagens específicas sobre motores elétricos padrão. Isso é particularmente evidente em aplicações como pinças, onde os movimentos têm que ser altamente personalizados dependendo se o objeto sendo agarrado é, por exemplo, uma bola, um ovo ou um tomate.
Robert Katzschmann tem uma ressalva: -Comparado a robôs andantes com motores elétricos, nosso sistema ainda é limitado. A perna está atualmente presa a uma haste, pula em círculos e ainda não consegue se mover livremente.- Trabalhos futuros devem superar essas limitações, abrindo a porta para o desenvolvimento de robôs andantes reais com músculos artificiais. Ele elabora ainda mais: -Se combinarmos a perna robótica em um robô quadrúpede ou um robô humanoide com duas pernas, talvez um dia, quando for alimentado por bateria, possamos implantá-lo como um robô de resgate.-
LB (MPI-IS)
Mais informações
O Max Planck ETH Center for Learning Systems (CLS) é uma parceria entre o Max Planck Institute for Intelligent Systems (MPI-IS) na Alemanha e os departamentos de engenharia da ETH Zurich, Suíça. O CLS aborda questões de pesquisa interdisciplinares no design e análise de sistemas de aprendizagem naturais e artificiais. O estudo acima é um exemplo ideal de um projeto de pesquisa colaborativa sobre inteligência física sob o guarda-chuva do CLS.

Desde 2015, essa parceria vem impulsionando a pesquisa e treinando futuros líderes de pesquisa. O elemento central é um programa de bolsa de doutorado coorientado. Cada bolsista tem um supervisor da ETH Zurich e do MPI-IS e está localizado principalmente no grupo de seu orientador principal, com um período de intercâmbio de 12 meses gasto no local do coorientador. Os bolsistas do CLS recebem seu título de doutorado da ETH Zurich. Mais de 60 jovens pesquisadores buscaram seus títulos de doutorado por meio desse modelo.
Muitas pessoas usam auxílios de navegação, mas nossos cérebros navegam surpreendentemente bem mesmo sem tecnologia. Esta edição lança luz sobre como encontramos nosso caminho em ambientes desconhecidos melhor do que máquinas, como robôs aprendem a lidar com novas tarefas e terrenos desconhecidos e como nós, humanos, podemos nos orientar na massa de informações na internet e expor informações falsas.
Um dispositivo de natação com apenas alguns milímetros de comprimento usa um acionamento magnético para impulsionar o movimento modelado em bebês águas-vivas



